Sharp prezentuje haptyczne rękawice VR i kontroler z funkcją wykrywania drobnych tekstur
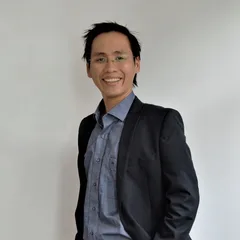
Japońska firma Sharp Corporation zaprezentowała właśnie prototyp haptycznej rękawicy i kontrolera VR, który tworzy subtelne wrażenia dotykowe na powierzchni opuszków palców, umożliwiając odczuwanie tekstur w wirtualnym środowisku. Rękawica przenosi również podstawowe wejścia kontrolera (joystick i trzy przyciski) między kciukiem a palcem wskazującym, potencjalnie umożliwiając nawigację i interakcje.
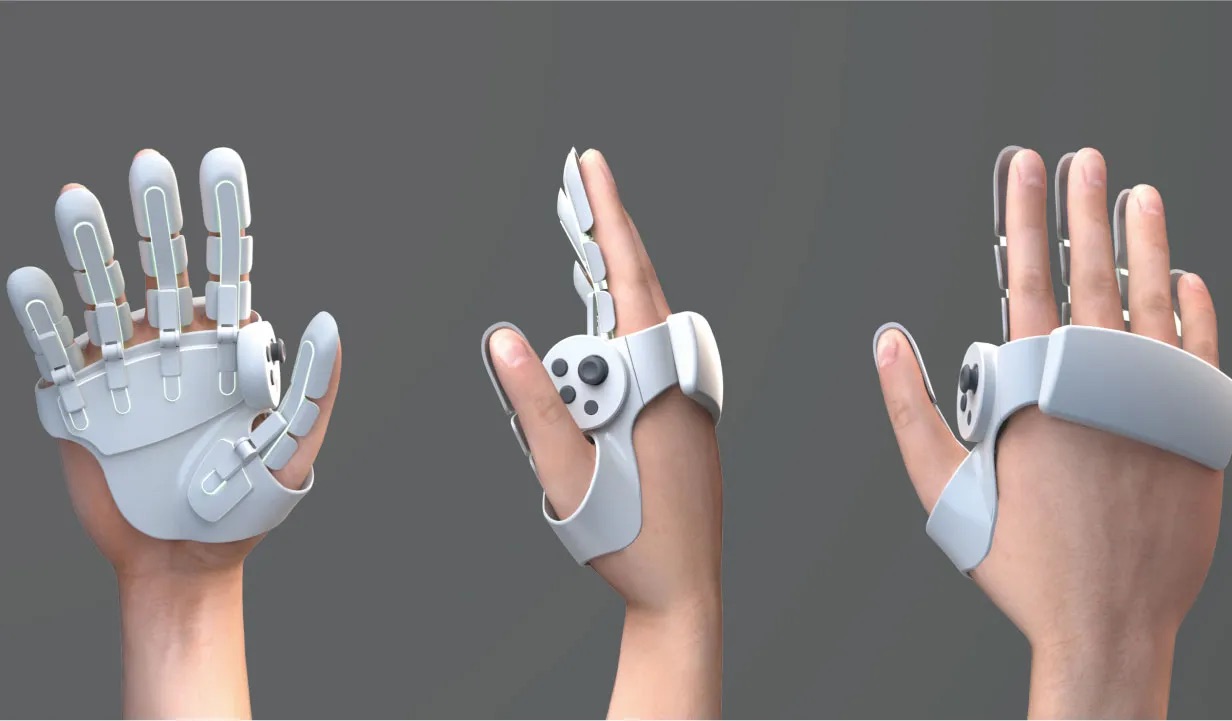
Należy zauważyć, że nie jest to rękawica z siłowym sprzężeniem zwrotnym, która pozwala trzymać lub wyczuwać kształt obiektów poprzez fizyczne odpychanie palców. Zamiast tego wykorzystuje "wielosegmentowe dotykowe elementy wykonawcze" na każdym opuszku palca, aby przekazywać szorstkie lub gładkie tekstury. Są to zasadniczo elektrody na powierzchni przetwornika, które przekazują wzorce wibracji.
W przeciwieństwie do innych kontrolerów typu pełna rękawicabrakuje również precyzyjnego śledzenia palcówco pozostawia otwartą kwestię tego, w jaki sposób mógłby on wykorzystać indywidualne możliwości wykrywania tekstur w każdym opuszku palca. Zamiast tego Sharp twierdzi, że pracuje nad metodą mocowania, która sparowałaby go z popularnym kontrolerem VR, takim jak te dostarczane z Meta Quest 3S, dodając w ten sposób bardziej precyzyjne możliwości pozycjonowania.
Rękawica została wyceniona na 100 000 jenów (lub 680 dolarów) dla pierwszych testerów, ale wstępne rejestracje są już zamknięte. Firma Sharp wyraźnie dąży do skrócenia czasu opracowywania poprzez włączenie użytkowników na wczesnym etapie procesu. Wyobraża sobie również deweloperów dodających dane dotykowe do Środowisk VR przy użyciu istniejącego oprogramowania do edycji obrazu opartego na GUI, chociaż nie podano konkretnych szczegółów.
Ponieważ urządzenie wciąż znajduje się w fazie jednoczesnego rozwoju i testowania, nie jest jasne, kiedy, jeśli w ogóle, stanie się produktem gotowym do wprowadzenia na rynek. Nieco wymowne i/lub niepokojące jest to, że wszystkie obrazy na stronie projektu są renderami, a nie zdjęciami, ale będziemy trzymać kciuki.

Źródło(a)