 Deutsch
Deutsch English
English Español
Español Français
Français Italiano
Italiano Nederlands
Nederlands Polski
Polski Português
Português Русский
Русский Türkçe
Türkçe Svenska
Svenska Chinese
Chinese Magyar
MagyarNaukowcy z ETH Zurich zaprezentowali czworonożnego robota ANYmal AI, który jest w stanie pokonywać tory przeszkód jak psy K-9 na obozie treningowym

ETH Zübogaci naukowcy zajmujący się robotyką zaprezentowali czworonożnego robota ANYmal zdolnego do poruszania się po złożonym terenie za pomocą wysoce wyszkolonych modułów AI do poruszania się, widzenia i lokalizacji. Te najnowocześniejsze moduły rozszerzają zakres przeszkód i terenów, po których czworonożne roboty mogą samodzielnie się poruszać.
Wcześniej wykazano, że zrobotyzowane "psy" poruszają się po czystych chodnikach i korytarzach budynków, a także po wzgórzach i terenach zewnętrznych, ale polegały na ludziach, którzy prowadzili szkolenie, długim czasie obliczeń w celu określenia najlepszego sposobu poruszania się lub wcześniejszej znajomości środowiska. ETH Zübogate badania omijają te ograniczenia, a ANYmal jest w stanie dynamicznie wychodzić z upadków i poruszać się po złożonych powierzchniach, mimo że jest w pełni wyszkolony w symulacji Nvidia Isaac Gym symulacji bez nadzoru.
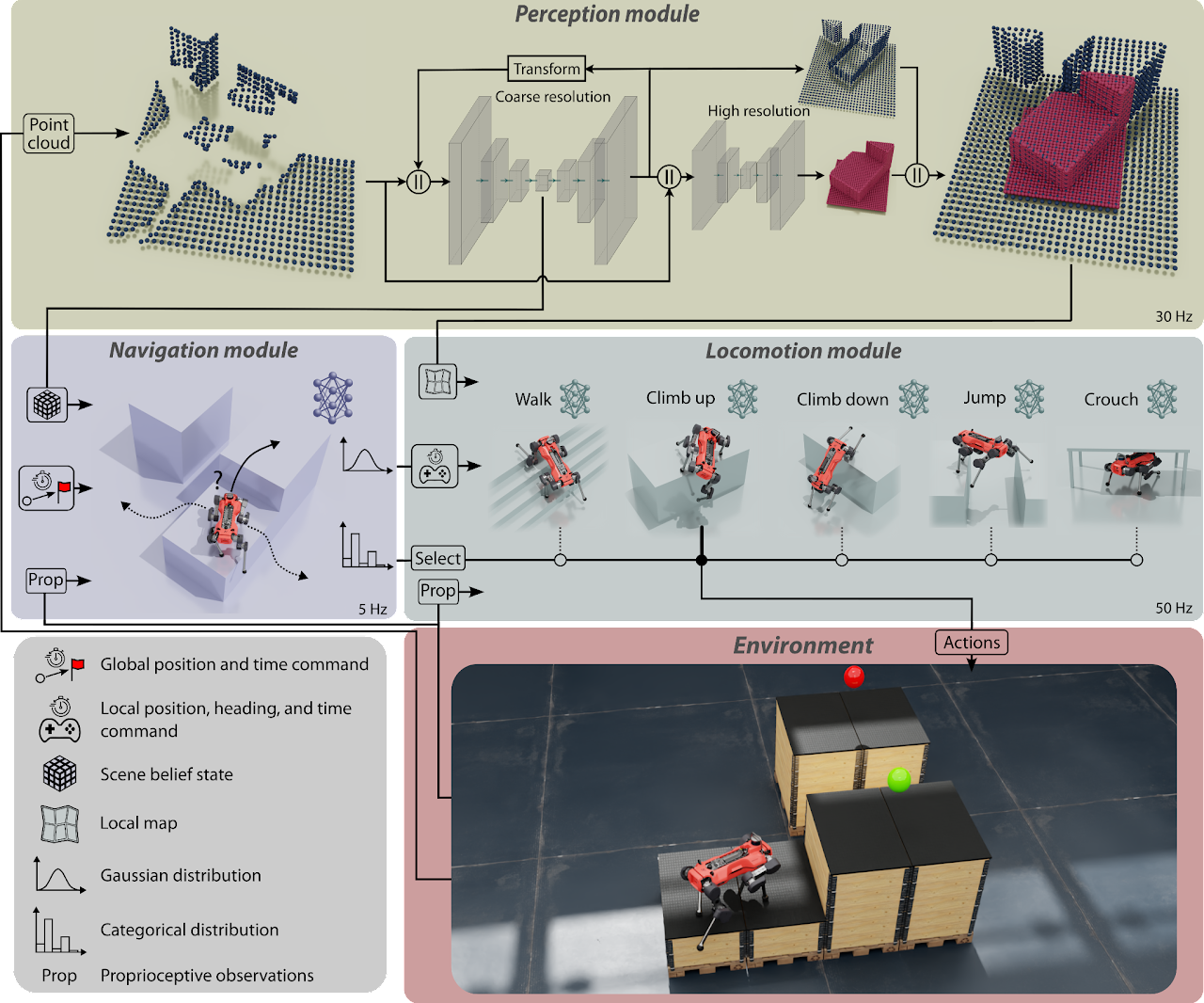
Trzy moduły składające się na mózg AI
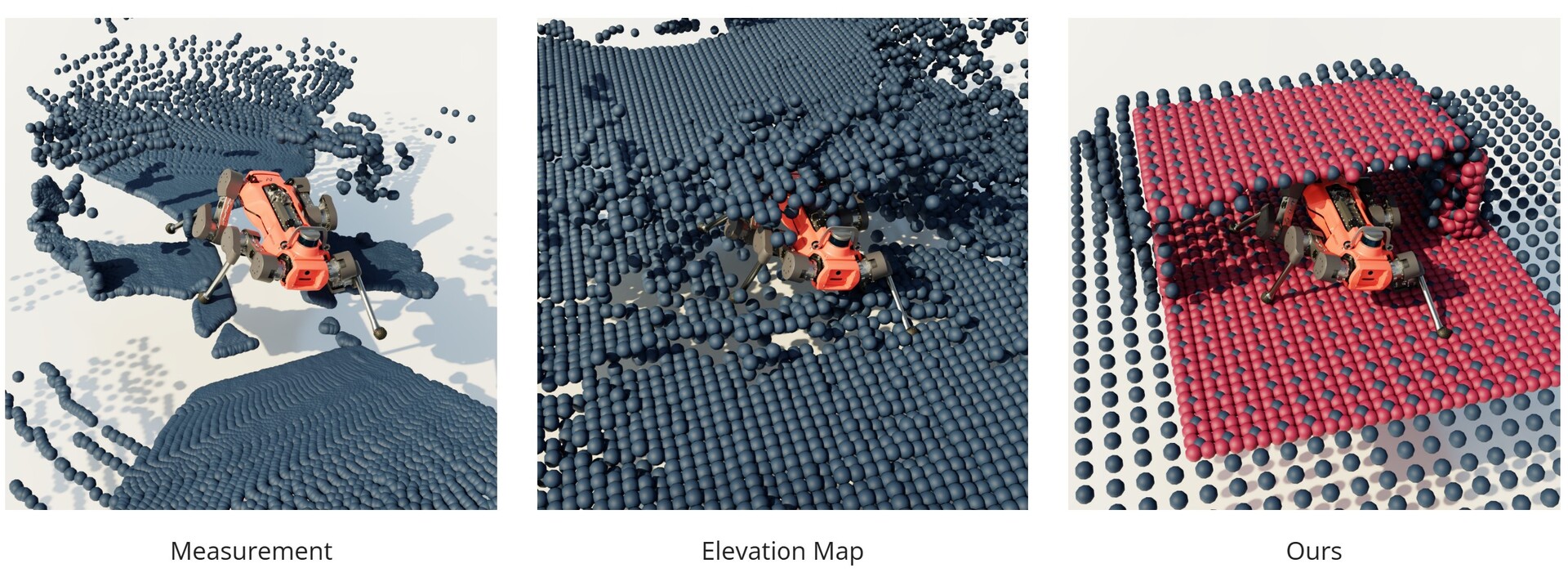
Moduł wizyjny widzi świat za pomocą sześciu Intel Realsense kamer głębi i Velodyne LiDAR zasilanych przez kontroler Nvidia Jetson Orin kontroler. Ponieważ skanowanie laserowe i w podczerwieni zwraca tylko pozycję poszczególnych punktów, roboty napotykają blokady drogowe nawigujące pod przeszkodami lub do wyższych lokalizacji z powodu brakujących informacji. Naukowcy z ETH próbują to obejść, rekonstruując świat w 3D na podstawie skanów.
Moduł ruchu zawiera pięć akcji: schodzenie, wchodzenie, kucanie, skakanie i chodzenie. Każda z nich była trenowana pod kątem coraz trudniejszych wyzwań. Na przykład, wirtualny robot został przeszkolony do kucania pod niższymi i niższymi stołami podczas poruszania się do przodu lub przeskakiwania z jednej platformy na drugą, gdy różnica się zwiększała.
Moduł nawigacyjny bierze to, co widzi moduł wizyjny i uczy się łączyć to z kierunkiem, pozycją i czasem, których wymaga każda umiejętność ruchu, aby ukończyć trudne, symulowane trasy. Moduł został przeszkolony na 3000 testowych trasach i nauczył się nawigować z powodzeniem w ponad 96%.
ANYmal w akcji
Gdy wszystkie trzy moduły zostały przeszkolone w symulacji, mózg oprogramowania AI został zainstalowany w 55-kilogramowym robocie ANYmal D zasilanym przez dwa zestawy procesorów Intel i7, 8 GB pamięci RAM i 240 GB SSD. Wideo przedstawiające robota ANYmal wykonującego kursy w prawdziwym życiu pokazują jego zręczną zdolność do szybkiego pokonywania trudnego terenu i przeszkód, które zatrzymałyby inne roboty.
Czytelnicy zainteresowani rozwijaniem umiejętności w zakresie robotyki powinni zaopatrzyć się w zestaw(taki jak ten na Amazon) wraz z książką, aby dowiedzieć się więcej o robotach(taką jak ta na Amazon).
Źródło(a)

